Приобрести-Сплит-Систему | Вызвать-Мужа-На-Час | Заказать-Монтаж-Кондиционера
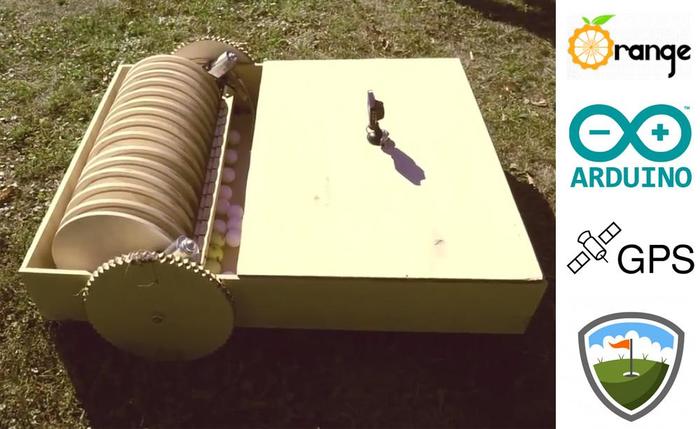
Робот для сбора мячей для гольфа своими руками
12 сентябрь 2022, 04:50, 259, 021 век ознаменовался веком автоматизированных технологий. Автоматизация сейчас применяется везде: производство, освоение космоса, бытовые потребности. Не исключением стал и спорт. Предлагаем Вашему вниманию статью: как сделать робота для сбора мячей на поле для гольфа своими руками.
Для чего это нужно? Сбор мячей для гольфа — не простое удовольствие. В ручную самостоятельно не набегаешься собирая мячи разбросанные по многокилометровым полям. На помощь нам приходит автоматизация.
Но почему своим руками? Стоимость таких роботов порой превышает все допустимые пределы цены. Разработать такого робота не составит труда человеку немного разбирающемуся в инженерии и программировании. Если нет, то думаю их можно найти среди фрилансеров или Ваших знакомых. Так же этот ротоб универсален в том что нет необходимости в дополнительной наладке. Его принцип прост: принес на поле и включил.
Необходимые материалы
Листы фанеры
Колесо для мебельной фурнитуры
Круглый металлический профиль
Пластиковые шестеренки
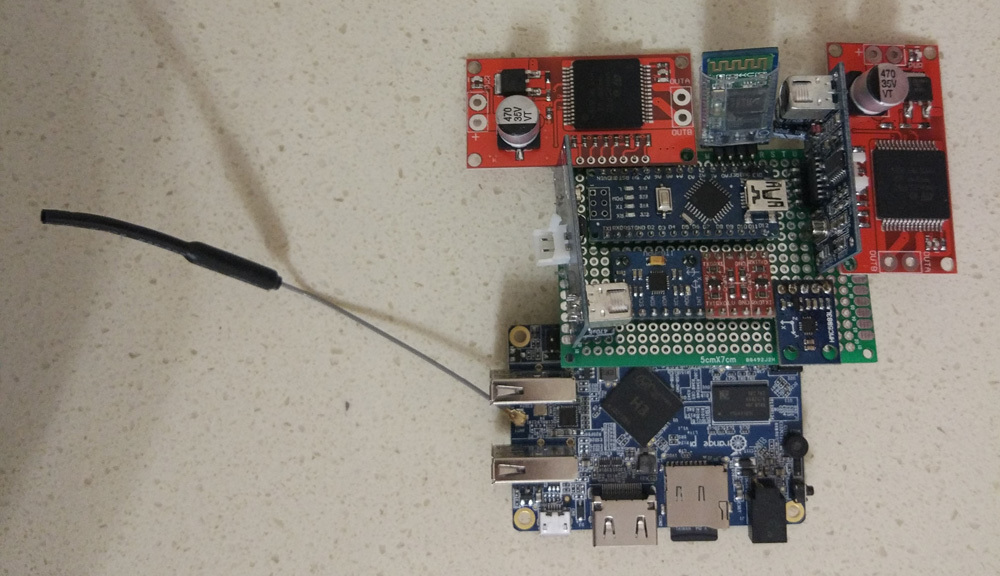
Электрика робота
Orange Pi Lite;
Arduino nano;
GPS модуль GY-NEO6MV2;
2 драйвера двигателя VNH2SP30;
Bluetoth Hc-06;
2 ультразвуковых модуля J34;
Конвертер логических уровней;
Модуль 3-х осевого гироскопа и акселерометра GY-521 MPU-6050;
Блок из двух реле;
Аккумуляторная батарея на 12 V;
Двигатель от стеклоподьемников — 2 штуки на каждое колесо.
Инструкция
Изготавливать робота будем по следующему чертежу:

Размеры определяйте самостоятельно подгоняю их друг под друга и под то оборудование которое у Вас будет под рукой. Необходимо учесть что робот будет нести в себе двигатель и аккумуляторную батарею.

Изготовление механизма захвата мячей
Механизм захвата мячей представляет из себя цельные ДСП диски скрепленные между собой металлической балкой. Особенность их в том что стоят они под углом по отношению друг к другу что бы при прокатке по земле, цеплять мячи и закидывать их в отдельную корзину в роботе.
Механическая часть робота для сбора мячей для гольфа
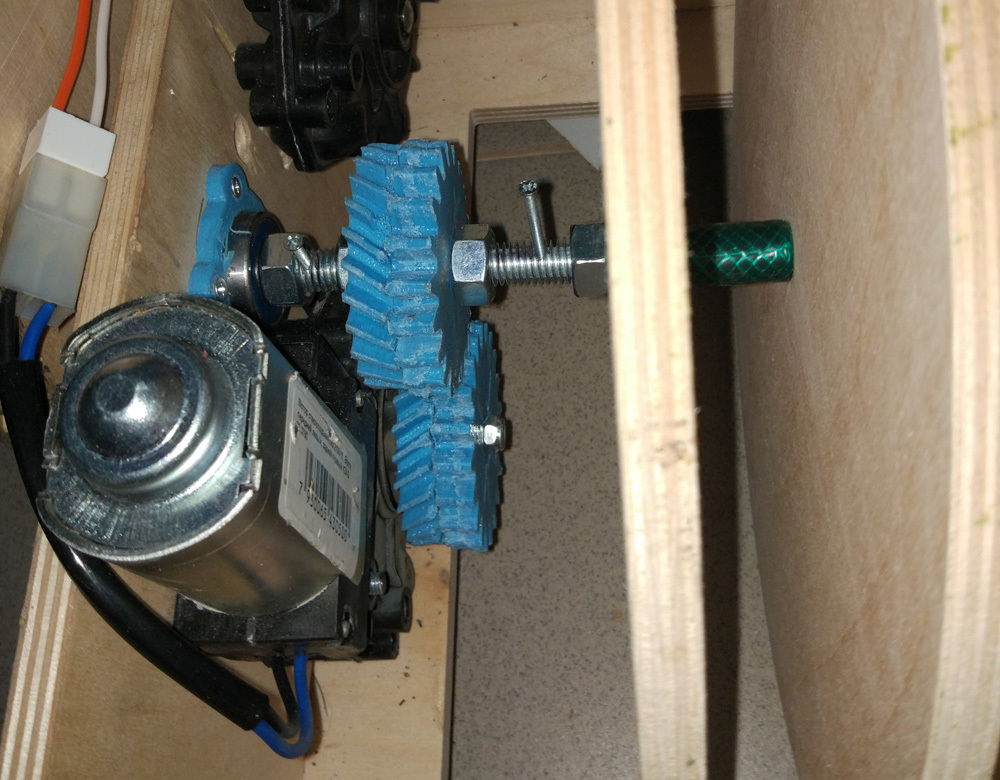
В данной модели робота используется электродвигатель от стеклоподъемников. Его мощность составляет 12V и его мощности хватает что бы можно было крутить колеса и вал с механизмом захвата мячей
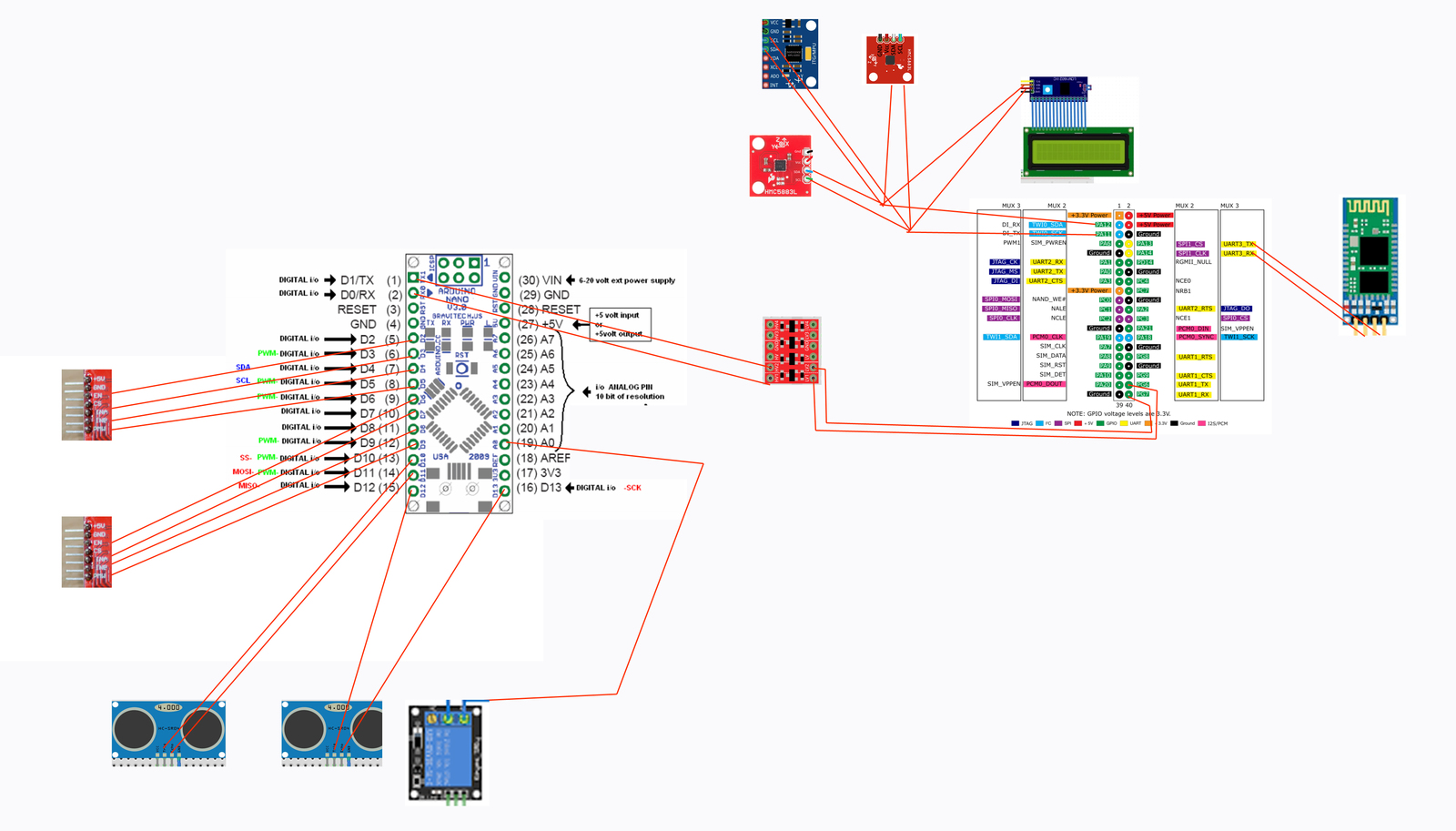
Электрика робота
Электрическая начинка робота начинается с самого главного. Это процессора. В роли процессора был выбран AtMega на базе Arduino. Это платформа позволяет нам достаточно просто подключать дополнительные модули и программировать.
Автоматизация и программирования робота необходима для следующих целей:
Ориентация в пространстве для поиска базы для сброса шаров;
Ориентация в пространстве для поиска зарядной станции;
Ориентация в пространстве для того что бы не убежать за пределы поля.
Как видим. Основа — это ориентация в пространстве. Сборку электрики будем производить на монтажной плате. Для дальнейшего удобства и возможности расширения.
Собранный робот в полевых условиях проявил себя в лучшем свете. Он легко ориентируется по GPS, собирает до 95 процентов всех шаров что находит, и у него есть возможности к дальнейшему росту.
Как сделать робота для сбора мячей своими руками. Видео
Источник: https://pikabu.ru/story/kak_ya_razrabotal_robota_dlya_sbora_myachey_dlya_golfa_6164756
Источник: https://svoimi-rukam.ru/hand-made/robot-dlya-sbora-myachey-dlya-golfa-svoimi-rukami/